社會機器人田野測試─觀察人們的反應
當機器人在科學博物館-與人們進行互動
在人機互動(human-robot interaction)中最基本的議題,應當是要能應用在真實的世界當中,並且透過互動來實現最真實的服務。而對於服務型機器人而言,實驗室並非真實的環境;然而在真實的環境中,才存在脈絡資訊以及可供辨識的情境 (the robot cannot properly behave without contextual information and recognition of a situation.)。
有許多研究團隊利用田野測試的方式,在小學、車站、科學博物館等不同場所,搭配使用遠端操控系統(tele-operated systems)和感應器網路(sensor network)進行測試,除了能夠從一旁協助機器人和人類互動之外,也能夠讓研究者更深入瞭解人類的真實行為。
以下三點則是人們期待人形機器人執行人類會做出的動作之後,希望可以達成的效果:
可以自動化的行動。
透過相機、雷射掃描來觀測環境並且建立環境的模型。
奠基於環境模型,得以設定起始點到目的地的路徑。
人機互動的目標,主要是發展一個能夠與人類進行智慧溝通的機器人,並且可以應用在極具規模的真實日常生活環境,例如像是博物館等。而在博物館場域內,該機器人便可以透過身體的姿勢動作、眼神、表情等非語言溝通和語言溝通等不同互動方式,來幫助人們進行導覽或是處理其他問題。
而透過博物館內的感應器資料,可以協助機器人自動化地與人們進行互動。例如像是讓所有參與者穿戴無線射頻辨識(RFID)裝置,而該裝置可以記錄訪客在博物館內遊覽的路線、移動歷程、訪客姓名與生日等個人資料,而機器人便可以根據訪客資料來提供建議或是產生行動。
文章中並舉例在大阪科學博物館進行的社會機器人田野測試,實驗主要是在該伯物館的四樓展示空間進行,共有75個展品,而訪客通常是依照逆時針的路線瀏覽參觀各個展品。在此實驗中使用的設備與器材包含2台不同類型的人形機器人、無線射頻辨識(RFID)閱讀器與標籤、紅外線照相機、攝錄影機等。
而在參訪博物館的過程中,如果決定並同意要加入此實驗的訪客,必須先在註冊櫃台(圖1中的A點)提供名字、生日、年齡等個人資訊,然後就會獲得一個無線射頻辨識(RFID)的標籤;接著該訪客就可以隨意的在四樓體驗展覽,也可以自由地和展覽中設置的四個機器人(圖1中的BCDE點)進行互動。
而在展覽區域設置的四個機器人當中,一個機器人負責導引展覽,兩個機器人負責解釋展覽內容,一個機器人則安排在E點提醒訪客歸還他們的無線射頻辨識(RFID)標籤,並且向訪客們道別說再見。
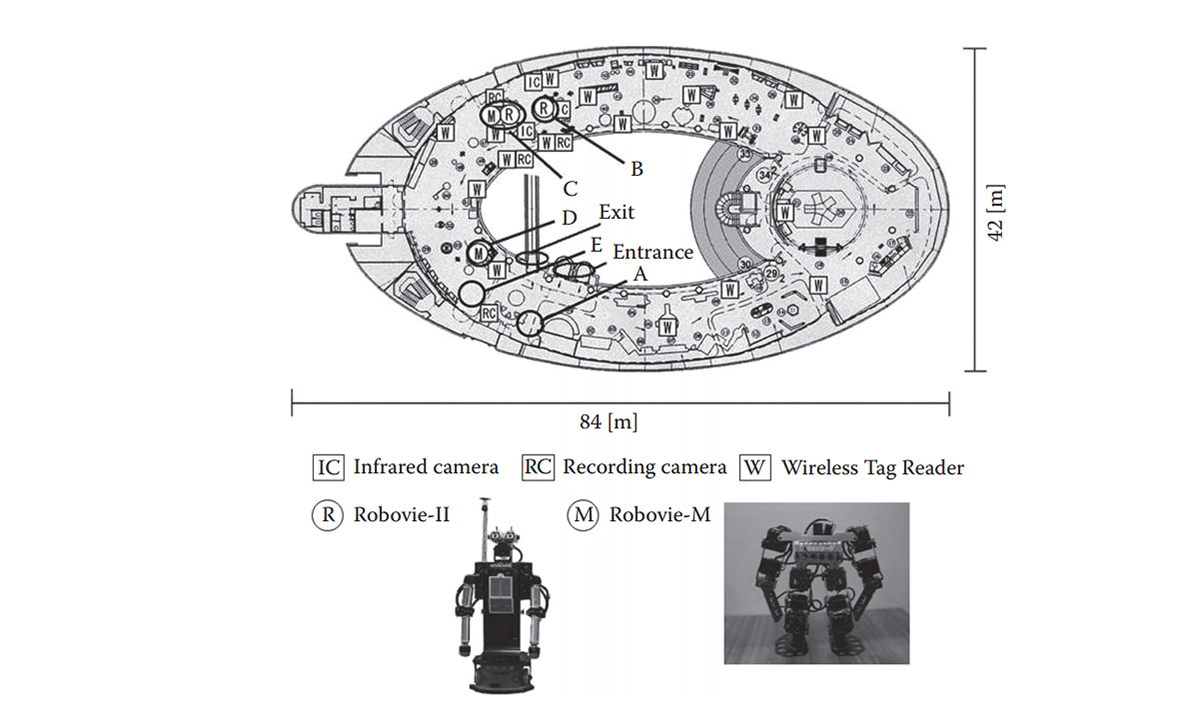
圖1 大阪科學博物館田野測試展覽空間平面圖
而寫入資料庫中的資料則會被用來決定社會機器人如何與觀展民眾進行互動,並且用來作為分析實驗的參考依據。資料庫中的資料除了參與實驗的觀展民眾在註冊櫃台填寫的個人資訊之外,還能夠提供給機器人資料包含訪客ID、民眾從註冊到歸還RFID標籤所經過的時間,亦即觀展全程的時間、透過RFID閱讀器所得知的每位訪客觀看某個展品所耗費的時間等。機器人可以知道展場中每個感應器所感知到的事情,展場中共設置20台RFID閱讀器、3台可精確辨識位置的紅外線照相機以及4台攝錄影機,在展場中錄製到的影像檔案會儲存到電腦中以便之後讓研究人員進行更進一步的資料分析。
接下來,我們稍微說明設置在博物館內的2種人形機器人(Robovie-II、Robovie-M)所具備之特色:
| 機器人名稱 | Robovie-II |
Robovie-M |
|---|---|---|
| 外型 | 具有人形的外表,雙腳不可分開 | 具有人形的外表,有兩隻腳 |
| 語音 | 透過電腦和喇叭可以發出聲音 | 接上電腦和喇叭可以說話 |
| 程式設定 | 有固定模組(Situated modules) 可以選取,讓機器人進行特定的行為, 好比像是呼喚名字、握手、打招呼、 解釋展品、導覽等 |
此機器人的行為取決於Robovie II 的行為以及RFID標籤輸出的內容 |
| 其他 | 搭載RFID閱讀器可以辨識個體 | |
而在博物館場域內所設置的機器人會出現哪些行為呢?機器人所扮演的角色比較類似導覽人員,好比像是會在自己所處的環境中走動、和參觀民眾進行互動,導覽他們看展等。而機器人與人們的互動行為則主要可以分成以下四種類型:
與人們進行具有童趣的互動,像是玩剪刀石頭布。
透過RFID標籤所記錄的訪客資訊,每一個機器人都可以叫出訪客的名字。
展覽引導服務,機器人能夠讓訪客跟隨著他們,導覽人們去四個不同的展品。
透過RFID標籤所記錄的訪客在某個展品前之停留時間,機器人能夠評估觀眾是否在該展品前停留超出預設的停留時間,如果超過時間的話,表示訪客已經看過了某個展品,機器人就會向訪客詢問觀展感想;或者就是建議訪客可以再去看哪個展品。
透過RFID標籤的紀錄,機器人們會知道參觀民眾已經逛過展場的哪些展品,且會嘗試透過參觀民眾的展場瀏覽紀錄與觀展民眾互動,企圖去激發訪客更多的興趣與熱情投入觀展活動。而放在靠近展場出口的說再見機器人,則會跟參觀民眾說再見,如果民眾沒有依照預設的逆時針觀展路線行動,而是走成順時針路線時,原先應該在觀展結束時才會遇見的說再見機器人,也會與民眾進行互動,告知他們走錯路線。
此田野測試實驗進行約2個月的時間,參展民眾除了跟機器人互動之外,還必須要協助研究團隊完成一份問卷,問卷題目如下:
我對機器人感興趣
當我面對機器人時,我覺得他們很友善
我發現機器人提供的導覽很有效
當機器人跟我講話時,我覺得焦慮
想到機器人在不遠的未來能在各種廣泛的應用任務中表現(就像這場展覽一樣),我覺得很焦慮
而研究統計結果顯示在2個月的展覽期間,共有91,107人至博物館進行參觀,而願意參與實驗進行RFID標籤註冊的觀展民眾有11,927人,最後有完成填寫問卷的有2,891人。根據問卷分析結果,大部分的觀展民眾對於機器人本身是感興趣並且留下良好印象,但是對於機器人的導覽並沒有留下很深刻的印象;觀展民眾對於機器人的焦慮感是很低的。而觀展民眾提供的其他評論還包括像是:「我們在參觀展覽的過程感到很愉快」、「我覺得很有趣,因為機器人叫了我的名字」、「我覺得跟機器人很親近」等。
而依據田野測試結果所整理的資料,機器人與參觀民眾之間產生許多互動行為,我們亦可以嘗試從下述互動行為中觀察機器人和訪客的互動是否良好,例如像是經常會有很多小孩子和大人圍觀在機器人旁邊;小孩子會和機器人握手、划拳或是擁抱,有時候還會模仿機器人的動作;如果機器人移動至別的地方,有的小孩子會跟著機器人一起移動;在機器人解釋說明完望遠鏡展品之後,聽完解說的小孩子就會移動去看那個展品,而當他回來繼續觀察機器人的時候,又會有別的小孩子去看展品等;有位觀展民眾表示當機器人靠近他的時候,他會感受到機器人有注意到他,他很喜歡這個功能。
此外,田野實驗中還觀察到觀展民眾還會出現兩種典型行為,分別為聆聽機器人講話及期待機器人叫出參觀民眾的名字。
整體而言,透過加入機器人與觀展民眾互動的方式,能夠提升人們對於相對不夠有趣或是較不具有吸引力的展品之瀏覽動機與參觀興趣。
雖然觀展民眾可透過和機器人互動而發展對於展示內容學習的興趣,但仍存在有某些狀況,使得機器人無法和參觀民眾進行互動,導致此情形發生的可能原因像是有的小孩子對於機器人感到害怕,因此無法或是不願意與機器人進行互動;或是有一些觀展民眾並不是很在意機器人的行為,因此也可能造成與機器人的互動頻率下降。此外,機器人的語音辨識能力不足,也會讓觀展民眾留下負面的印象。
根據該田野測試實驗的結果,研究團隊提出如果機器人能夠與人們有自由地進行互動和提供像真正的導覽員一樣的導覽行為,可以改善觀展民眾對於科學和科技的興趣,因為當人形機器人在展場時,可以吸引人們去和他進行互動;而擁有像人類的行為舉止亦將能夠使機器人表現得更為自然。而在此田野實驗測試中,可以發現機器人目前面臨的一個重大問題,便是缺乏語音辨識的能力,對於機器人而言,可以辨識出一個人是一個十分重要的機器人溝通的功能,而在此田野測試中,透過RFID標籤存取之觀展民眾個人資料,便是機器人能夠呼叫觀展民眾名字的行為產生之關鍵;人們之所以會對於導覽功能比較沒感覺,可能是由於觀展民眾皆將目光放在機器人本身,對於大家而言是新奇的,所以不會在意細節資訊。
當機器人在車站-作為一個被動社交的媒介
當人形機器人做為一個被動社交的媒介時,如果擁有人形的外觀,人們會認為機器人應該擁有人類的能力,人們將可以更自然地和機器人溝通。透過讓兩個機器人互相對話,人類也能夠更容易理解該怎麼跟機器人講話。而為了避免掉機器人互動設計不充足的缺點,所以嘗試透過將機器人提供給人們的資訊最小化來解決這個問題。被動的媒介就好比像是電視上播送的新聞節目,人們除了接收該媒介提供的資訊之外,實際上並無法對其做任何事情,因此,研究團隊嘗試讓機器人直接提供資訊給人們,或是讓兩個機器人互相講話來自然地提供資訊,就像談話性新聞節目一樣,由於人們無法直接與機器人進行互動,只能單方面接收資訊,因此就比較不會感受到機器人互動設計不夠充足的問題。
研究團隊將兩個機器人互相講話的行為模式稱作為「被動社交媒介(passive-social medium)」,此時的機器人角色有兩種,一種是進行廣告行銷的角色;一種是用來公告相關事項的角色。此田野測試實驗主要是在新車站開幕的情境中進行,在此情境中的機器人會介紹不同的新火車路線,也會宣傳火車站附近的景點。在此田野測試中,機器人的行為是用情境腳本控制系統(scenario-controlling system)來控制,例如機器人有裝載雷射距離偵測器,因此當有人靠近時,機器人會向他敬禮等,透過各種感應器的配置可以讓機器人看往人們的方向、角度、距離。而情境腳本則是事先撰寫好的,因此在只有一個機器人的情境中,機器人便會自行講話;在有兩個機器人的情境中則會自然地互相進行對話。
此田野測試實驗的場域是在日本的学研奈良登美ヶ丘車站,該車站在2006年3月份開幕,是屬於近鐵鐵路京阪新線的轉運站之一。在此田野測試中,機器人被放置在手扶梯的前方,機器人會廣播資訊給從左手邊的手扶梯走來的乘客,而依據車站的動線規劃,大部分從左手邊手扶梯走來的人們皆是剛下車的乘客。而所有經過機器人面前的搭車乘客都算是研究參與者,他們的行動都會透過裝置在上方的攝影機被觀察。實驗時間包含尖峰時段與非尖峰時段,研究團隊設定五個情境腳本,並共有四種機器人行為內容:
Passive Condition (P)
一個人形機器人、有感應器但是不使用。隨機播放五個情境腳本
Interactive Condition (I)
一個人形機器人、有感應器可以根據人的位置改變腳本。如果沒有人靠近,機器人會有閒聊用的閒置對話,例如會一個人自言自語自己很餓之類的
Passive-Social Condition (Ps)
兩個人形機器人、有感應器但是不使用。隨機播放五個情境腳本
Interactive-Social Condition (Is)
兩個人形機器人、有感應器可以根據人的位置改變腳本。如果沒有人靠近,機器人會有閒聊用的閒置對話,例如會互相討論肚子餓了要去吃什麼
而五個情境腳本的內容如下所示,包含車站的廣播和旅遊資訊,每個情境腳本約持續3分鐘的時間。閒聊用的閒置對話腳本也有五個,閒聊對話大概持續30秒。
1)去大阪的旅行時間
2)ATR(國際電機通訊基礎技術研究所,Advanced Telecommunication Institute International)的資訊,為研究團隊所屬機構
3)藉由這個火車路線,可以去哪裡
4)東大阪的資訊
5)靠近這個車站的設施
此田野測試實驗主要進行的測量包含問卷和行為分析兩個部分;問卷的部分共有三題,1到7分為評量分數,問卷的問題如下:
1)乘客的問題被機器人解決的感覺
2)乘客對於機器人發布的內容感到有興趣
3)乘客有享受在有機器人的情境中
而針對參與該實驗乘客所進行的行為分析,整理出主要的幾種行為如下:
忽略:直接走過去沒有注意到機器人
注意:直接走過去但是有注意到機器人
停下來看:停下來看機器人,大概聽1至2項資訊
停下來很久:不厭其煩地一直看機器人,即使資訊開始重複了也無所謂
觸摸:摸機器人的肩膀、摸機器人的手臂,少數人會不管機器人會不會壞掉的問題,還是硬是舉起他的手臂或是跟機器人抱抱
改變角度去端詳機器人:靠近機器人一探究竟
討論機器人:一群人在旁邊互相討論機器人
和小朋友一起看機器人:大人等小朋友看機器人或是大人叫小朋友看機器人
照相:拍下機器人的照片
而根據實驗分析結果顯示,因為「交互式」媒介的性能在實際領域中的實際使用受到限制,因此使用「交互式」媒介並不一定能提供良好的傳播結果。在此田野實驗測試中,車站的乘客有的時候會停下來去聽聽看機器人在說什麼,顯示即使是在步調快速、很忙碌的地方,也還是會有人對於機器人感到高度興趣,由此亦可推論被動社交媒體具有前景,因為該系統有更好的機會能夠讓人們停下來並對機器人發佈的訊息產生興趣。
此研究也展示機器人在公共場合中做為媒介時會呈現如何的樣貌,相對於高程度的互動,低程度的互動將是較為適當的模式,畢竟要在很複雜的環境中,讓機器人擁有良好的語音辨識或感應能力仍十分困難。
由於機器人會帶給人們新奇性的關係,究竟兩個對話的被動社交機器人是不是有良好的傳播效果,在此田野測試實驗結果中並無法完全確認;但是根據此實驗結果能夠確定有兩個機器人的情境會比一個機器人的情境還要更加吸引人,且因為實驗中設定機器人不會與乘客進行互動,也可以讓乘客更去注意兩個機器人之間的對話,顯示被動社交媒介是吸引人們對訊息感興趣的最有效方式之一。
參考資料
Kanda, T., & Ishiguro, H. (2017). Human-Robot Interaction in Social Robotics (1st ed.). Chapter2:Field Tests-Observing People’s Reaction. CRC Press.