人機互動中的情緒研究
去年於社會機器人知名期刊 International Journal of Social Robotics 出版的一篇回顧性研究中,統整了過去二十年來,在機器人心理學領域(Robotic Psychology)中以情緒(Emotion)作為主題的研究,並將各篇情緒研究之主題進行分類,為這個新興的領域建構一個相對完整清楚的架構。
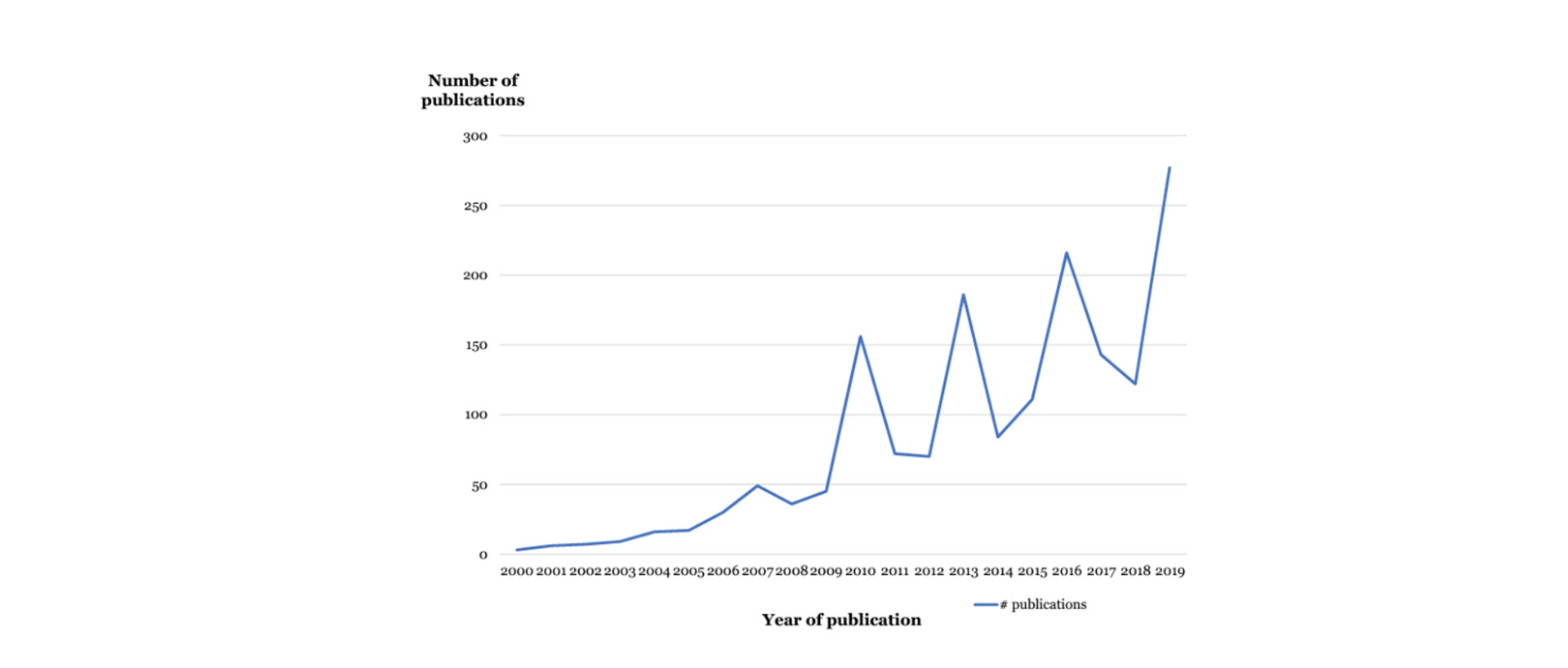
在過去的二十年內,情緒主題在機器人心理學領域的發展可以說是逐漸起步,由下圖可知,在2000年左右,幾乎沒有相關的研究,直到近年,隨著機器人學、電腦科學等科技領域在研究上的突破,使得人機互動、機器人心理學領域研究者得以再更多情緒議題相關的研究。
對於有志於研究人機互動(Human–Robot Interaction)情緒領域的研究者來說,很難透過閱讀一篇篇的實證研究掌握這個領域的全貌,最主要的原因在於人機互動情緒領域的研究之間,可重複性低,而這項特徵也廣泛的出現在人機互動與心理學領域。由於可能影響人機互動實驗的變數太多,每個研究或每次實驗都獨具特色,因此在不同的實驗之間很難相互參照與比較。而這項特性恰好凸顯了本篇回顧文獻的重要性:為人機互動情緒領域的研究整理出較為清晰的脈絡。
在環境心理學中,有一個著名的理論稱作S-O-R模式(Stimulus-Organism-Response model )。三個字母分別代表刺激、有機體與反應,簡而言之,就是描述生物—通常研究者有興趣的對象是人類,與環境互動的方式。考量的條件必須包含外在環境對人的刺激
、人類本身作為生物體的特性以及在生物體受到刺激之後,會出現哪些反應。除此之外,不同個體、社會文化群體之間,都存在些微差異。甚至同一個人在不同情境中,也可能做出不同反應,而這些因素被研究者稱為隨機效果(contingency effect)。以下將針對S-O-R三者進行討論,並且有機體的部分,會以機器人作為替代,也就是說,研究範圍包括機器人受到哪些類型的刺激、如何感知並處理這些刺激,到機器人如何做出反應。
首先是刺激。刺激可以大致分成表情、語言和非語言三類,比較敏銳的讀者可能會發現,表情明明也是非語言表達的一種,為什麼會被獨立分出呢?主要是因為面部表情作為情緒表徵的一種,在目前人機互動情緒研究中佔有相對重要的地位,因此特別提出來作為一個分類。機器人能做出的反應,也大致與受到刺激的形式雷同,研究者感興趣的,便是如何讓機器人的反應符合人際互動中的期望。
人機互動情緒領域研究者對機器人有興趣的部分,在於機器人的知覺與心智模型。最直觀的理解方式,就是學者想要將人類感知世界的方式,套用到機器人身上,例如視覺以鏡頭取代、聽覺以麥克風取代、觸覺以按鈕取代等等,但是在我們的五感之後,還有大腦在處理這些資訊,因此,研究者也試圖以心智模型模擬並解釋情緒如何產生、情緒如何影響我們的行為。
最後是隨機效果。隨機效果存在於人機互動的情境中,這也是被研究者所關心的議題,可能作為隨機效果的變因包括不同的社會文化族群、情境的設定、參與者的背景等,隨機效果屬於中介變項的一種。中介變項獨立於自變項與依變項之上,會對因果關係之強度產生影響。這也讓情緒在人機互動的研究難以相互對照或比較,評估的方式也隨著每個研究不同而有差異。 因此作者提出,在人機互動中,沒有最好的設計,只有最適合的設計。
簡單作結,人機互動情緒領域的研究可以分為受到的刺激、機器人的知覺與心智、機器人產生的反應,與隨機效果四大類,而每一類研究都需要不同領域背景的學者合作投入研究,不同研究領域之學者包括機器人學家、社會心理學家、電腦科學家、哲學家等等。
參考資料
Stock-Homburg, R. (2021). Survey of emotions in human–robot interactions: Perspectives from robotic psychology on 20 years of research. International Journal of Social Robotics, 1-23.