How a Robot Work
試想假若你有一隻機器人,他的外觀會長什麼樣子?有眼睛、有手指、高大嗎?會有什麼功能呢?偵測障礙物或是協助導覽嗎?要如何讓一個機器人運作?除了外觀還有三大要素:感測器、致動器、運算系統,這三項要素緊密連結與配合讓機器人得以完整運作。機器人經由感測器偵測到事物後,利用運算中心進行轉譯規劃出要實行的任務,轉化成行動並執行。
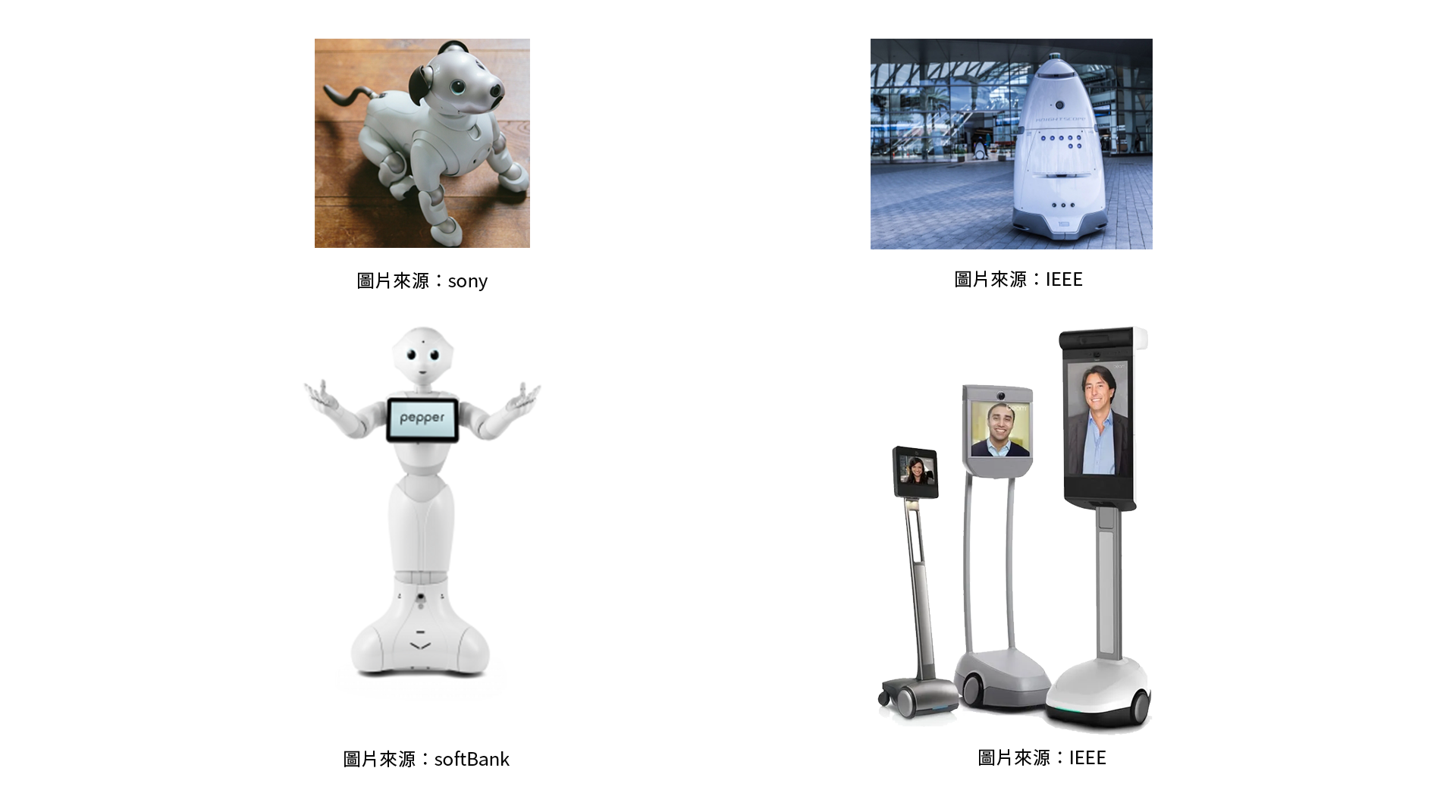
現在市面上有許多不同類型的機器人,如:家用機器人、商用機器人等,他們各有不同的外型,依照所需要完成的目標與任務進行設計。有仿生外觀的Aibo小狗機器人,像狗狗一樣以四肢移動、搖尾巴;也有外觀較為機械科技感的機器人,例如:掃地機器人Roomba、機器人保全K5;仿人型機器人Pepper,在商場或展場中進行導覽與招呼的工作;同時也開始出現虛擬機器人,此類型機器人並沒有實際的外觀,但可以透過其他媒介如電腦、行動裝置等與人們進行互動。
機器人如何感知環境以及開始動作
就像我們有感官能夠感覺世界上的事物,機器人也有感測器來接收外界的刺激。類似於我們的眼睛,機器人有雷射追蹤、相機等光感測器來偵測附近是否有物體或是辨別互動的對象;機器人若要聽到聲音,則需要有麥克風來進行收音;有些機器人會有壓力感測器,以及按壓式的按鈕知道有人觸碰到他,進而進行反應或其他動作。除了上述類似於人類感官的感測器之外,還有一些感測器像是IMU(Inertial measurement unit)能夠用來維持機器人整體的平衡,紅外線裝置則可以測量出機器人與其他物體間的距離。
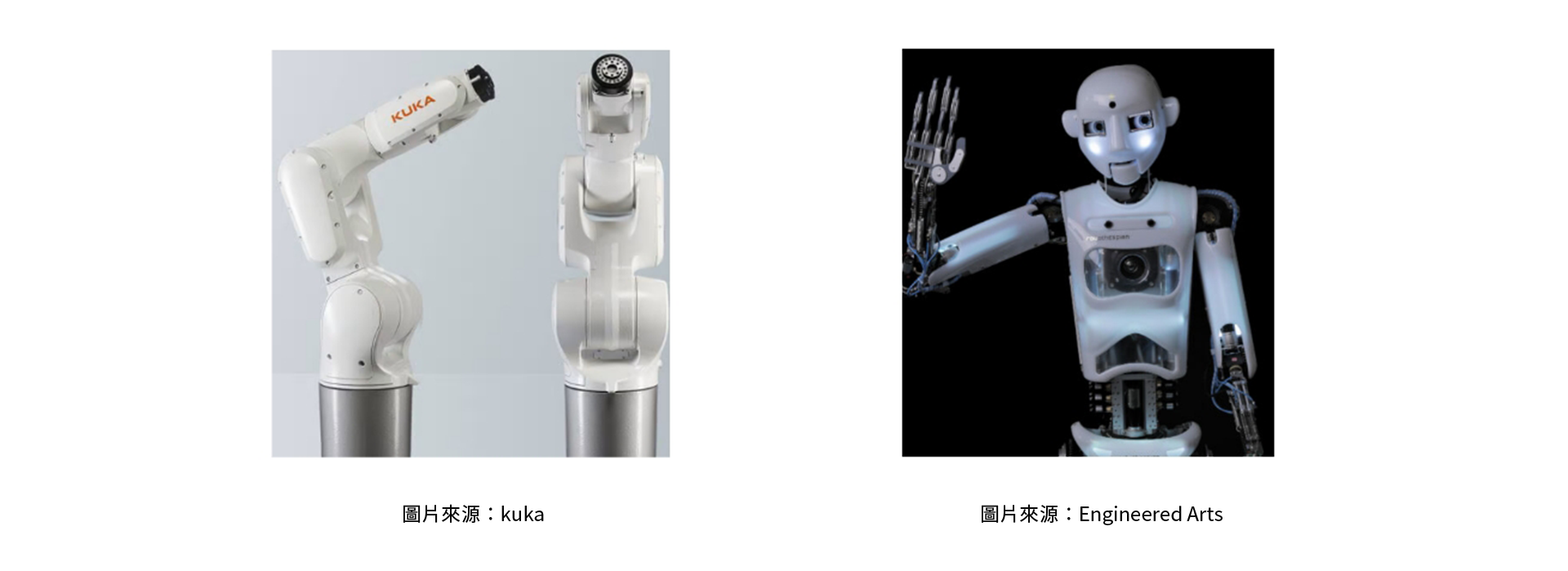
那機器人要如何動起來呢?答案就是致動器!馬達是最常見的致動器,透過將電能轉換成動能,讓機器人能夠執行動作。馬達裝在機器人的哪個部位,機器人的那個部位就可以動作。如果馬達裝在輪子上,當馬達啟動時,輪子就可以轉動,機器人就可以藉由輪子四處移動。馬達跟我們人類的關節有點相似,像是在機械手臂中,每一個要轉動的地方(也稱作自由度)都需要一個馬達,舉例來說一個機械手臂(如下圖)他會需要5顆馬達,才能完整運作。
另一種特別的馬達為氣動馬達,當機器人需要較快速地反應或是執行較精細動作時,就需要氣動馬達的協助。通常會應用在動作表現較擬人的人型機器人身上。通常會根據機器人需要執行的動作內容、動作執行的速度、以及需要多大的力量來執行此動作等面向進行馬達配置及設計的評估最後將馬達安裝在機器人身上,讓機器人可以順利的完成各種動作。至於聲音的部分,機器人可以經由喇叭播送聲音以及與人們進行對談,與其他馬達相比,喇叭雖然是最便宜的致動器,但是對於人與機器人互動的過程也是最不可或缺的。
機器人的腦袋在幹嘛
機器人是由軟體控制的,電腦中的指令會告訴機器人要如何執行動作。最常見的運作模型為「Sense-Think-Act」,機器人使用感測器接收到外界刺激後,傳回電腦評估該如何應對,最後做出反應。舉例來說:機器人感測障礙物的紅外線掃瞄到前方有障礙物,將此訊息回傳給電腦。電腦進行判斷需要避開障礙物,需要向右轉,再將指令傳給機器人,他便可以成功避開障礙物。為了使機器人可以更即時的做出反應與動作,目前有發展出其他更精細的軟體程式讓機器人能夠進行某些技巧的學習。隨著機器學習與深度學習的興起與發展,也有技術透過大量數據資料讓機器人重複判斷與學習,逐漸習得該技能,例如:給予機器人許多水果的圖片,讓機器人知道香蕉是長得黃色長長的,在看了許多水果圖片後,機器人便可以學會判別香蕉。
機器人由硬體與軟體結合,擁有多元的外觀感測世界以及對刺激做出反應,機器人可以成為我們人類的好幫手與朋友,然而機器人的軟硬體設計需要與人機互動(Human-Robot interaction)的研究相互支持輔助,讓人類在使用機器人以及跟機器人互動時更順暢!